近期,電智學(xué)院AiNET團(tuán)隊劉新宇博士和周清峰教授在運(yùn)動感知領(lǐng)域中探索研究取得階段性科研成果。相關(guān)論文成果發(fā)表在校定T類二級權(quán)威學(xué)術(shù)期刊IEEE Transactions on Industrial Electronics(中科院1區(qū))與B類期刊IEEE Signal Processing Letters(中科院2區(qū))。
運(yùn)動感知技術(shù)已被廣泛應(yīng)用于軍事、農(nóng)業(yè)、工業(yè)以及日常生活等各個領(lǐng)域,該技術(shù)也是數(shù)字孿生與VR/AR等新興應(yīng)用的核心技術(shù)之一。不同于傳統(tǒng)應(yīng)用,新興應(yīng)用覆蓋場景更加多元,對運(yùn)動感知系統(tǒng)的精度、能耗、可擴(kuò)展性以及魯棒性等性能均提出了更高的要求。在諸多類別的運(yùn)動感知系統(tǒng)中,基于慣性傳感器(陀螺儀與加速度計)的感知系統(tǒng)具有適應(yīng)面廣、分辨率高、感知頻率快且功耗較低等特點(diǎn),因此其被廣泛部署于手機(jī)、可穿戴設(shè)備、無人機(jī)以及車載導(dǎo)航等各類終端,具有較好的生態(tài)基礎(chǔ)。AiNET團(tuán)隊致力于為數(shù)字孿生等新興應(yīng)用落地提供可參考雛形,分析當(dāng)前的需求與瓶頸,在運(yùn)動感知領(lǐng)域深入探索,取得了兩項階段性成果。
成果一:基于無角速度計算加速度計陣列的軌跡重建方法
軌跡重建是運(yùn)動感知技術(shù)的主要研究方向之一。典型的主流方案中慣性軌跡重建系統(tǒng)同時搭載陀螺儀與加速度計,分別測量運(yùn)動物體的角速度與加速度,再通過對角速度與加速度進(jìn)行積分,可得到運(yùn)動物體的姿態(tài)、速度以及軌跡點(diǎn)。為更適應(yīng)低功耗場景,另一方案將相對功耗較高的陀螺儀替換為低功耗加速度計的陣列,利用加速度計陣列計算所需角速度,再進(jìn)行后續(xù)軌跡重建。然而,該方案在降低功耗的同時卻引入了額外的角速度計算,導(dǎo)致系統(tǒng)的累積誤差增大。
針對傳統(tǒng)方法存在的問題,本項工作創(chuàng)新性地提出了無角速度計算的加速度計陣列方案,在保證系統(tǒng)低功耗的同時,降低了系統(tǒng)的累積誤差。所提出的算法利用加速度計陣列內(nèi)的空間幾何約束,構(gòu)建軌跡重建優(yōu)化問題對最優(yōu)軌跡點(diǎn)進(jìn)行求解。本項工作求得了該優(yōu)化問題的閉式解,大大降低算法的計算復(fù)雜度。在實(shí)際二維場景的物理實(shí)驗中,與傳統(tǒng)的兩種方法相比,所提出的算法具有更高的軌跡重建精度、更低的功耗、更高的可擴(kuò)展性以及更強(qiáng)的魯棒性。這些結(jié)果表明所提方案相比傳統(tǒng)方案更符合新興應(yīng)用的需求,非常具有繼續(xù)深入研究的價值。圖1給出了本項工作的物理實(shí)驗平臺,圖2給出了各方案的軌跡重建誤差對比,圖3給出了各方案的累積誤差對比。
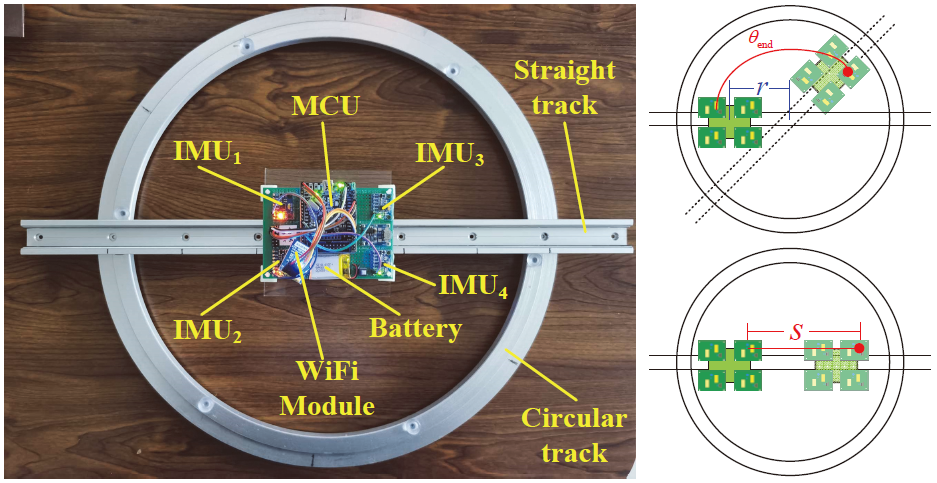
圖1 無角速度計算加速度計陣列的物理實(shí)驗平臺
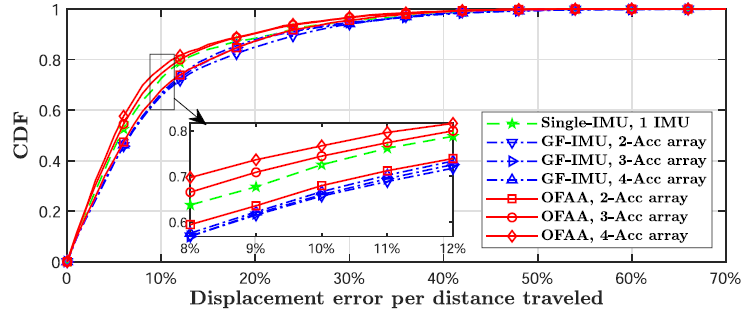
圖2 各方案的軌跡重建誤差CDF圖

圖3 各方案的誤差累積對比圖
該項工作以學(xué)術(shù)論文的形式發(fā)表于校定T類二級權(quán)威學(xué)術(shù)期刊IEEE Transactions on Industrial Electronics,論文信息為Liu X, Zhou Q, Wu J, et al. An ω-Free Accelerometer Array Method for 2-D Trajectory Reconstruction[J]. IEEE Transactions on Industrial Electronics, 2024, 71(1): 890 - 900. (IF: 7.7, 中科院1區(qū)Top)
成果二:基于時間反演的軌跡校正
實(shí)際場景中加速度計與陀螺儀并不理想,測量存在誤差,而慣性軌跡重建方法中的積分運(yùn)算對測量誤差有累積作用,這將導(dǎo)致軌跡重建結(jié)果的可信度隨時間降低,直至不可接受的程度。針對此問題,工程上一般假定誤差是線性增長,并基于此對軌跡進(jìn)行后處理校正。事實(shí)上,誤差累積過程是更復(fù)雜的非線性過程,傳統(tǒng)方案中線性增長的假定比較粗糙,且沒有系統(tǒng)完整的理論分析。
軌跡后處理校正是提升軌跡重建精度的有效手段,但系統(tǒng)分析的研究較少。本項工作創(chuàng)新性地引入宏觀運(yùn)動的時間反演對稱性,提出基于時間反演的軌跡校正算法。由于軌跡重建結(jié)果的可信度隨時間降低,那么針對同一段運(yùn)動,在時間正演下進(jìn)行計算,可信度將隨時間正反向逐漸降低,在時間反演下進(jìn)行計算,可信度將隨時間負(fù)方向逐漸降低。此外,時間正反演下同一時刻物體運(yùn)動的加速度與位置相同,而速度相反。基于這些條件,本項工作提出將時間正演軌跡重建的結(jié)果與時間反演軌跡重建的結(jié)果融合(圖4),實(shí)現(xiàn)整條時間軸上軌跡重建結(jié)果可信度的提升。相關(guān)理論推導(dǎo)已求得問題閉式解。在實(shí)際二維場景的物理實(shí)驗中,時間反演對軌跡精度的提升得到了驗證(圖5)。
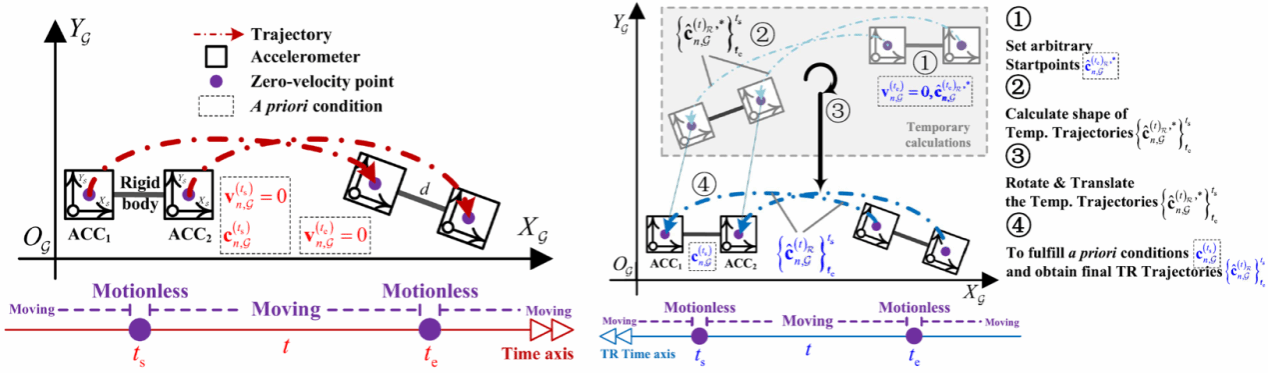
圖4 時間正演與時間反演下軌跡重建的示意圖

圖5 時間反演軌跡校正算法各階段軌跡重建效果對比圖
該項工作以學(xué)術(shù)論文的形式發(fā)表于校定B類學(xué)術(shù)期刊IEEE Signal Processing Letters,論文信息為Liu X, Zhou Q, Cheng C T, et al. Time-Reversal-Based Correction Algorithms for ω-Free Trajectory Reconstruction Method[J]. IEEE Signal Processing Letters, 2024, 31: 676-680. (IF: 3.9, 中科院2區(qū))
據(jù)了解AiNET團(tuán)隊擁有豐富的產(chǎn)學(xué)研經(jīng)驗,本文成果一中低功耗感知系統(tǒng)的相關(guān)工作即起源于以往劉新宇博士和周清峰教授團(tuán)隊對可穿戴設(shè)備的研究。本文成果二中,劉新宇博士引入宏觀運(yùn)動時間反演對稱性的想法源于幾年前觀看諾蘭科幻電影《信條(Tenet)》(圖6)后的啟發(fā),電影中對時間正演與反演的描繪為該項工作提供了靈感,因此在發(fā)表的論文成果中也將電影中用于區(qū)分時間正反演的紅色與藍(lán)色(圖6)用于標(biāo)記時間正反演下的軌跡重建(見圖4與圖5)。
圖6 電影《信條(Tenet)》海報與片中截圖
一審:鄧敏君 二審:李艷霞 三審:胡耀華
